Welcome to my Research Blog
Welcome to my first blog post. Let's get you up to speed regarding my research. After some careful code reorganization and debugging we have completed the visual processing portion of the project. This now gives us more information regarding the environment that the robotic snake is in. We can get exact information that helps us traverse obstacles and engage particular motion primitives.
We will have to rebuild the snake and this time all of the joints will move solely in the x and y plane, however, these small changes will have to be made to the code to adapt to the new dimensions of the snake.
I can illustrate a little bit more here. So the current closed loop process uses object oriented classes that house the information for the snake, the environment, and other things respectively. Therefore when instantiating the Snake model class object we have to pass in the rotational angles, the displacement between each motor joint that moves in the plane we want, and the tailframe in SE2 notation.
%MATLAB code
d = [50,100,150,200,250,300,350];
rot = [0,0,0,0,0,0];
tailframe = SE2([0,0],0);
snk = SnakeModel(d,rot,tailframe);
%These are arbitrary values to illustrate a point
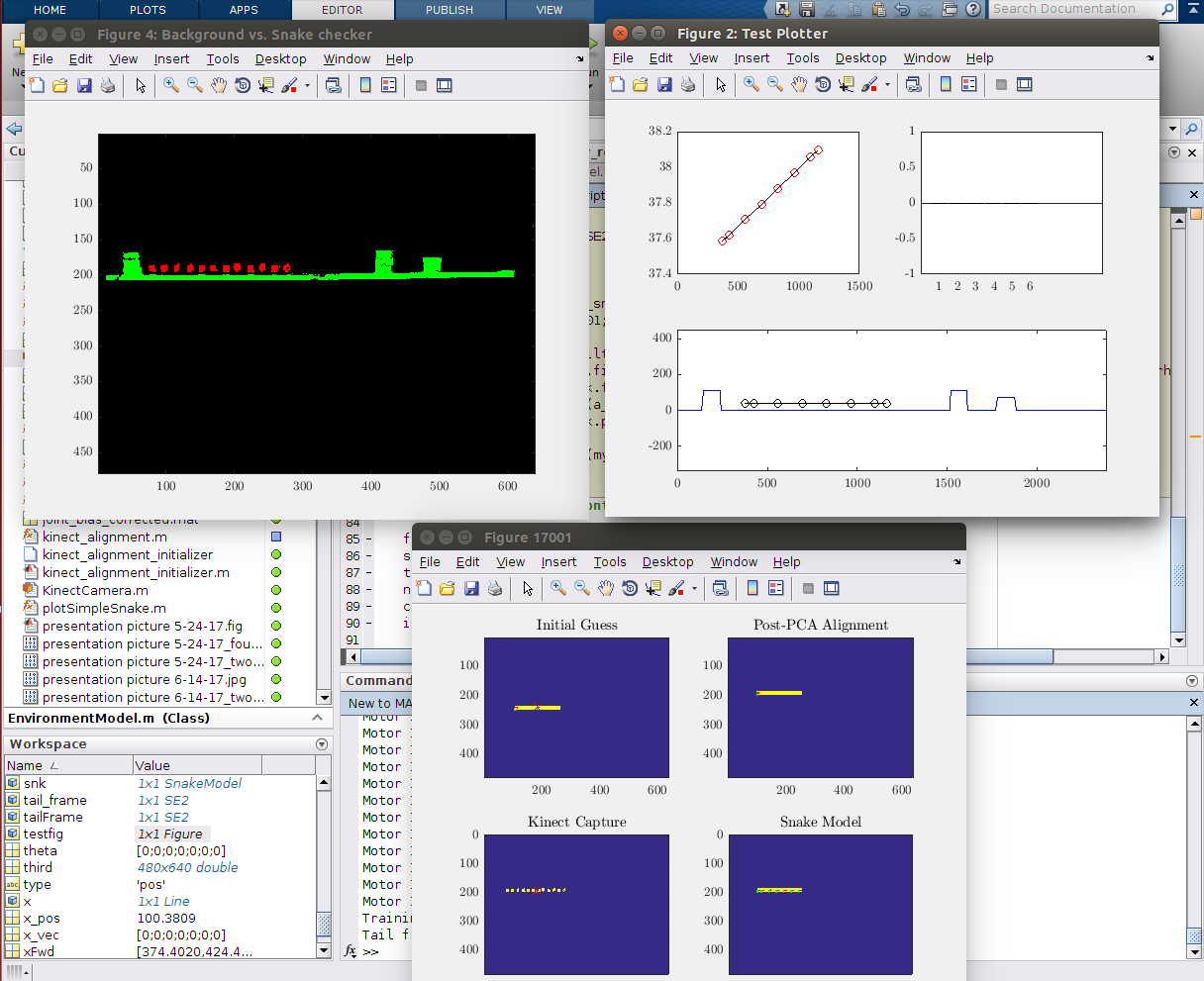
When all of the various classes work together they create this visual interface that models the snake's shape real time using SE2 notation, visual data, and tactile sensing. Below is the result.
Photographs by NASA on The Commons.