We just kind of built a brand new one.
So originally the snake we were using moved in the x, y, and z directions and thus we would zero out the motors that move in the z direction so it would not be engaged. This would result in the link length including this motor to be twice as long as a link length containing only motors that move in the xy plane. We were also trying to make the deadline for the International Conference on Robotics and Automation which was September 15th, however, we were not making reasonable progress. This however allows us to shoot for the next robotics conference deadline which is the International Conference on Intelligent Robots and Systems (IROS). So we have time to create a new snake for our research project.
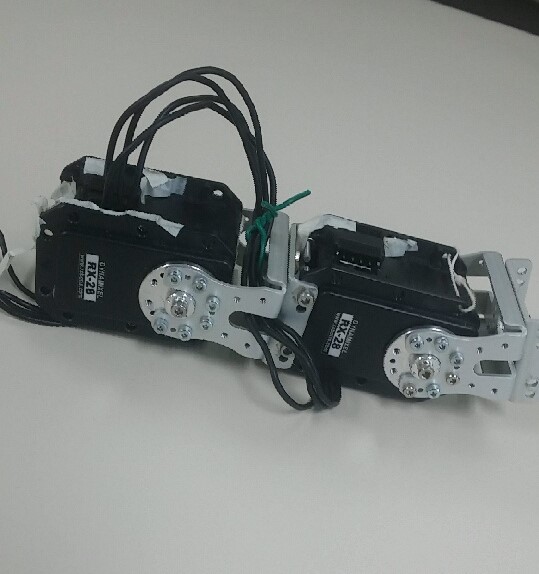 An image of two motor links connected by an aluminum bracket.
An image of two motor links connected by an aluminum bracket.
The image above is what two motors when connected by the aluminum bracket would look like. Each motor is connected in series with the motor in front of it and behind it using a serial 4 pin connection. Some of the advantages of rebuilding it this way give us a robot that is able to articulate over obstacles in the environment better.
 When programming or resetting the motor id on the motor or double checking that the motor is in the center position.
When programming or resetting the motor id on the motor or double checking that the motor is in the center position.
Photographs by NASA on The Commons.